


Pallet Truck
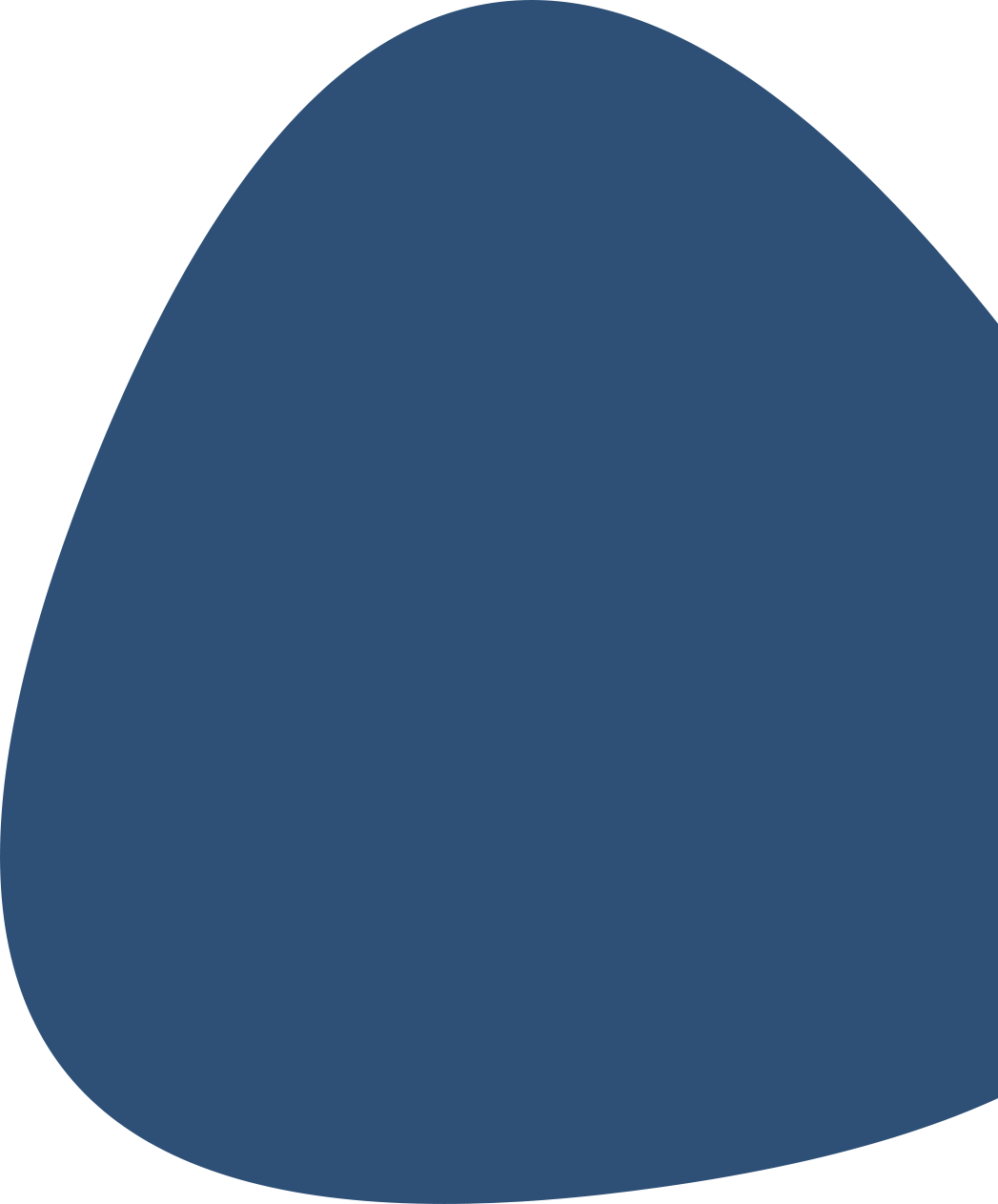
Integrated Differential Wheel Module

Integrated Differential Wheel Module
Tire Material
Nominal Torque
Power Range
Communication




| Model | AB-iDW-D150-V3.9-C100-■ | AB-iDW-D165-V1.9-C300-■ | AB-iDW-D180-V2.14-C500-■ | AB-iDW-D180-V1.57-C700-■ | AB-iDW-D180-V1.57-C750-■ | AB-iDW-D180-V1.18-C·1000-■ | |
| Power Supply | Main Power Supply | 24VDC – 60VDC | |||||
| Logic Power Supply | / | 24VDC | |||||
| Rated Linear Speed (m/s) | 3.9 | 1.9 | 2.14 | 1.57 | 1.57 | 1.18 | |
| Rated Torque Tn (Nm) | 3.6 | 21 | 40 | 54 | 60 | 80 | |
| Peak Torque Tn (Nm) | 10.9 | 60 | 99 | 150 | 150 | 200 | |
| Tire Diameter (mm) | 150 | 165 | 180 | 180 | 180 | 180 | |
| Tire Width (mm) | 40 | 39.5 | 50 | 50 | 50 | 50 | |
| Tire Material | Polyurethane (Optional) | ||||||
| Tire Hardness Rating | 73 A | 85 A | 90 A | 93 A ± 2 | |||
| Dynamic Braking | External braking resistor required (depending on operating conditions, mainly used in rapid start-stop scenarios) | ||||||
| Dynamic Braking Voltage Absorption Point | None | DC63 V ± 2 V | |||||
| Overvoltage Alarm Voltage | DC68 V ± 2 V | ||||||
| Undervoltage Alarm Voltage | DC18V ± 2 V | ||||||
| Input Specifications | 2 digital inputs / Common COMI terminal / High level: 12.5–30 VDC / Low level: 0–5 VDC / Max. frequency: 1 kHz / Input impedance: 5 kΩ | ||||||
| Output Specifications | 1 digital output, common COMO terminal / Max. output current: 100 mA | ||||||
| Brake | Built-in Brake and Control Circuit | ||||||
| Forced Brake Release Interface | One forced brake release interface, to be used only when the servo wheel has no power input | ||||||
| RS485 Debug Port | Maximum supported baud rate: 115.2 Kbps | ||||||
| CAN BUS | Maximum baud rate: 1 Mbps; supports communication with controllers via CANopen protocol. | ||||||
| Drive Current | Max. Continuous Output Current (RMS) | 7A | 16A | 26A | 25A | 27A | 27A |
| Peak Current (PEAK) | 26Ap | 64AP | 100Ap(<2s) | 100Ap(<2s) | 100Ap(<2s) | 100Ap(<2s) | |
| Motor | Rated Speed nN (rpm) | 3000 | 2000 | 2500 | 2500 | 2500 | 2500 |
| Rated Torque Tn (Nm) | 0.64 | 2.4 | 4 | 4 | 4.4 | 4.4 | |
| Brake Holding Torque T (Nm) | 2 | 4 | 4 | 4 | 4 | 4 | |
| Noise | / | <65dB | |||||
| Cooling Method | / | Natural Cooling with Vehicle-Assisted Heat Dissipation | |||||
| Operating Environment | Operating Temperature | 0 – 40 °C | |||||
| Storage Temperature | -20 – 60 °C | ||||||
| Humidity (Non-condensing) | Below 90% RH | ||||||
| IP Ratings | IP54 | ||||||
| Altitude | Rated operating altitude is below 1000 m. For operating altitudes above 1000 m, the power rating must be derated by 1.5% for every 100 m increase. The maximum operating altitude is 2000 m | ||||||
| Atmospheric Pressure | 86 kpa – 106 kpa | ||||||
| Note: ■ = B: With Brake | |||||||
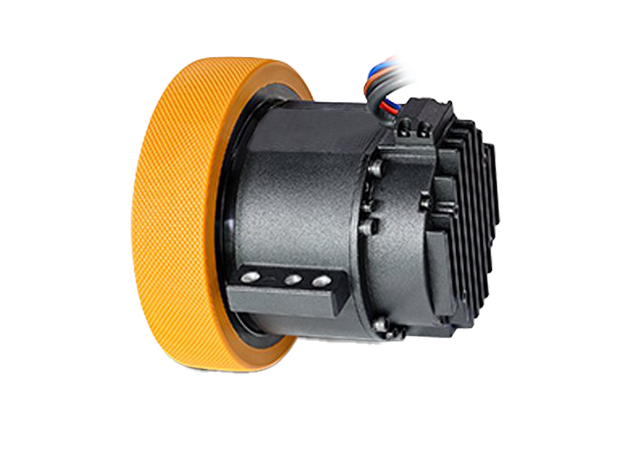
This integrated differential wheel module is a core motion component for industrial automated guided vehicles (AGVs). It integrates drive, control and differential functions into a single compact unit, streamlining the design and installation of AGV drive systems for industrial engineers.
This module features a nominal torque range of 3.6-40 N·m and a power output spanning 200W to 1050W. It uses wear-resistant polyurethane as the tire material and supports RS485 and Canopen communication protocols for seamless industrial system integration.
It is optimized for indoor industrial AGV applications including warehouse material handling, automated production line logistics and automated sorting centers. The polyurethane tire design also makes it ideal for environments requiring low noise and gentle floor protection.
Unlike standalone drive and wheel components, this integrated module eliminates the need for complex alignment during installation, reducing overall assembly time for AGVs. It also uses high-grade polyurethane tires with better wear resistance than standard rubber options, and supports widely adopted industrial communication standards for easier system matching.
You can contact authorized PCOPCO industrial component distributors or reach out to their regional sales teams directly. Be prepared to share your AGV’s required torque, power and communication needs to secure the right model for your project.
The PCOPCO Integrated Differential Wheel Module is a core motion component for industrial AGVs. It integrates drive power, differential control and wheel assembly into a single compact unit, simplifying AGV drive system design.
This module has configurable specifications to fit different needs. Its tire material is polyurethane for durable, low-noise indoor operation, with a nominal torque range of 3.6-40 N·m and power range of 200W-1050W. It also supports standard industrial communication protocols including RS485 and Canopen.
It is widely used across various industrial AGV scenarios. Common use cases include warehouse order-picking vehicles, workshop material transfer trolleys and flexible production line guide AGVs. The polyurethane tire and precise motion control make it ideal for smooth indoor factory floors.
Compared to separate drive and wheel assemblies, this integrated module reduces installation complexity and saves space on AGV chassis. It supports mainstream industrial communication protocols, eliminating extra adaptation work for most control systems. PCOPCO’s module also undergoes strict industrial reliability testing for long-term stable operation.
First, confirm the required torque and power based on your AGV’s rated load to select the right specification range. Check if your control system supports RS485 or Canopen protocols to ensure compatibility. You can also reach out to authorized PCOPCO distributors for professional matching and after-sales support.
The PCOPCO Integrated Differential Wheel Module is a purpose-built industrial AGV component that combines drive, differential and wheel functions in one compact unit. It streamlines AGV drivetrain assembly and reduces potential points of failure compared to separate component setups.
This module uses polyurethane tires for durable, low-noise operation. Its nominal torque ranges from 3.6 to 40 N·m, with a power output spanning 200W to 1050W, and it supports both RS485 and Canopen communication protocols.
This module works well for a wide range of industrial AGV use cases, including warehouse material handling, automated production line logistics and factory floor transport. It supports both light-duty and heavy-duty tasks thanks to its adjustable torque and power ranges, and performs reliably in low-noise required environments like cleanrooms.
Compared to assembling separate drive, differential and wheel parts, this integrated module cuts down on installation time and labor costs. It also has a smaller footprint, freeing up valuable space on the AGV chassis, and reduces signal interference risks with its unified design.
First, confirm your AGV’s required torque and power output to match the module’s available ranges. Next, ensure its communication protocol (RS485 or Canopen) aligns with your existing industrial control system. You can also reach out to PCOPCO’s technical team for project-specific recommendations.


Discover the future of AGV technology with POC